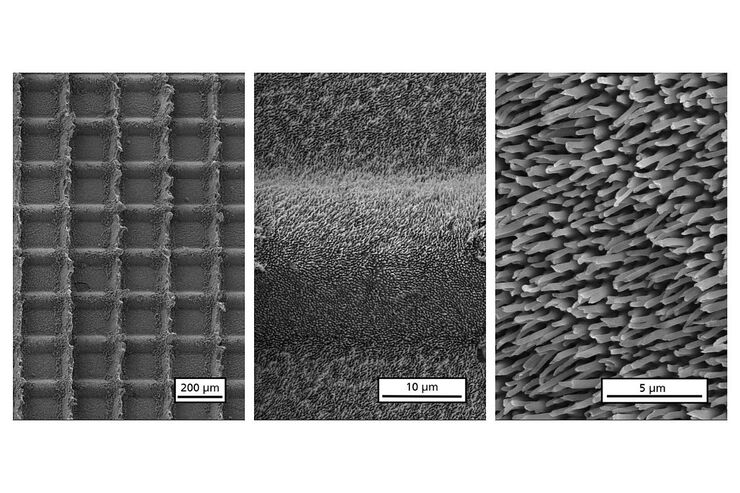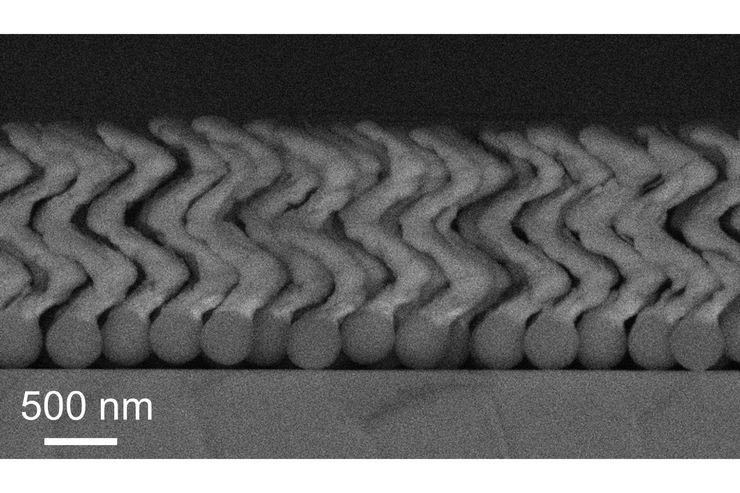
Wissenschaftler der Forschungsgruppe „Mikro-, Nano- und Molekulare Systeme“ am Max-Planck-Institut für Intelligente Systeme in Stuttgart haben propellerförmige Nanoroboter entwickelt, die von außen durch dichtes Gewebe wie den Glaskörper eines Auges gesteuert werden können. Bisher war es lediglich möglich, Mikroroboter durch Modellflüssigkeiten zu bewegen – nicht aber durch echtes Gewebe. Die zähflüssige Konsistenz des Augapfel-Inneren wirkt wie eine Barriere und verhindert das Eindringen größerer Partikel und Strukturen. Außerdem sorgen die chemischen Eigenschaften der Molekülmatrix dafür, dass sämtliche Partikel stecken bleiben, da sie wie ein klebriges Geflecht wirkt. Aus diesem Grund haben die Forscher eine spezielle, zweilagige Antihaftbeschichtung eingesetzt. Die erste Schicht besteht aus Molekülen, die an die Oberfläche andocken, während die zweite eine flüssige Beschichtung ist, die die Haftung zwischen den Nanorobotern und dem umliegenden Gewebe verringert. Bei der flüssigen Beschichtung ließen sie sich von der fleischfressenden Kannenpflanze inspirieren. Auf ihren Blättern, die als Fallgruben dienen, sorgt eine rutschige omniphobe Beschichtung dafür, dass Insekten ausrutschen und hineinfallen. Auf den Propellern sorgt die Schicht dafür, dass die Haftung zwischen dem Netz aus Molekülen im Glaskörper des Auges und der Oberfläche der Nanoroboter möglichst klein bleibt. Diese spezielle Antihaftbeschichtung sowie die schraubenartige Struktur und die geringe Größe der 500 Nanometer breiten Nanopropeller ermöglichen das relativ ungehinderte Fortbewegen durch das Auge, ohne dass das empfindliche Gewebe beschädigt wird. Die Forscher sind damit dem Ziel einige Schritte nähergekommen, Nanoroboter eines Tages als Transportmittel für Medikamente oder andere Therapeutika für die minimal-invasive Behandlung von Krankheiten aller Art zu nutzen.
(Wi)