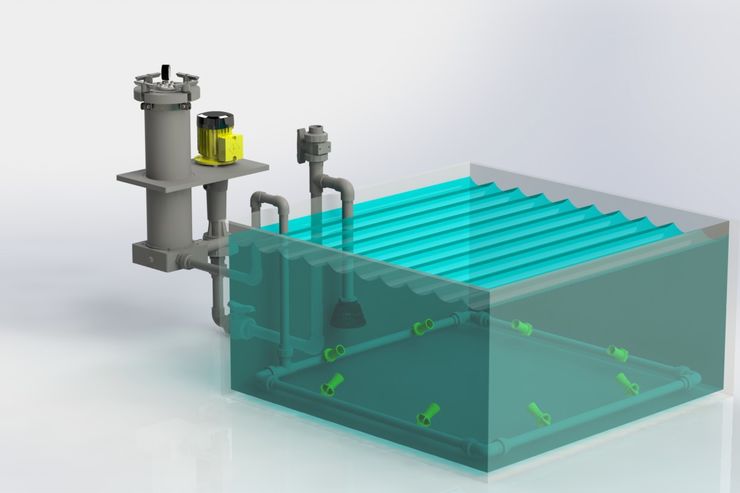
Wissenschaftlern vom Fraunhofer-Institut IPA und dem Danish Technological Institute (DTI) ist es erstmals gelungen, dass Industrieroboter Galvanikgestelle bestücken und leeren können. Grundlage dafür ist eine Bildverarbeitungssoftware die am IPA entwickelt und immer weiter optimiert wurde. Durch die Software können Industrieroboter Werkstücke, die ungeordnet in einem Behälter liegen, zuverlässig erkennen, sicher greifen und definiert ablegen. Ist ein Bauteil zweifelsfrei identifiziert, bestimmt die Software einen geeigneten Greifpunkt. Dabei spielt es keine Rolle, wenn die Werkstücke chaotisch in einer Kiste lagern, also unterschiedlich ausgerichtet und teilweise verdeckt sind. Mit einer Reihe von Maßnahmen ist bei der Holzapfel Group der Nachweis gelungen, dass das Bestücken und Leeren von Galvanikgestellen auch mit dem abgewandelten Griff-in-die-Kiste möglich ist. Noch schafft diese Tätigkeit ein Mensch schneller. Doch die Forscher sehen durchaus noch Optimierungspotenzial.
Bild: Bestückung von Galvanikgestellen mit einem Industrieroboter
Autor(en): Ke