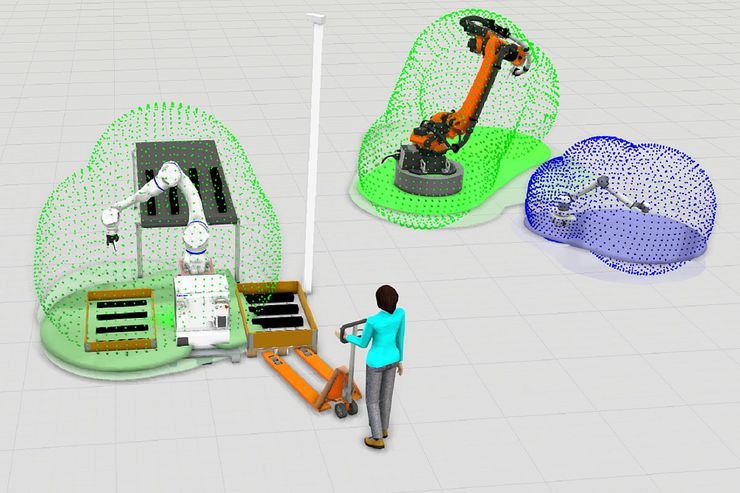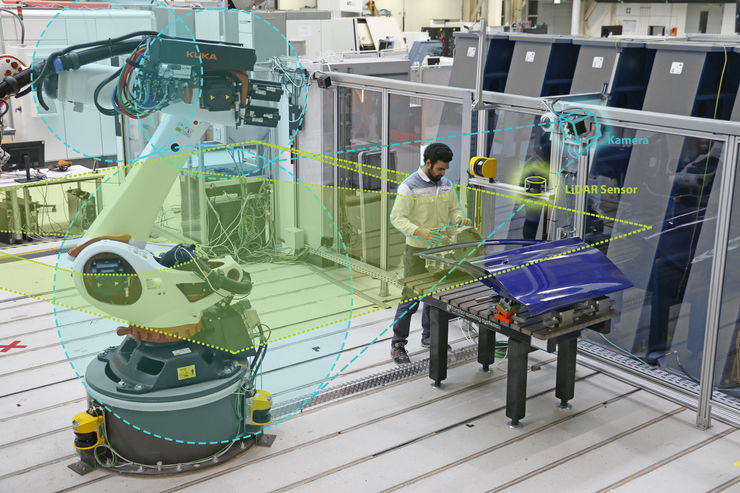
Industrielle Fertigungsprozesse sollen gleichermaßen effizient, flexibel und für die Mitarbeitenden sicher sein. Arbeiten Mensch und Roboter gemeinsam an komplexen Aufgaben gilt es Zielkonflikte zwischen diesen Anforderungen zu vermeiden. Das Team vom Fraunhofer IWU um Aquib Rashid M.Sc., Ibrahim Al Naser M.Sc. und Dr.-Ing. Mohamad Bdiwi entwickelt dazu einen Geschwindigkeitsregler sowie ein multimodales, umfassendes Wahrnehmungssystem. Die zentrale Fragestellung für die Forschenden in einem Anwendungsfall bei der SEAT S.A. war dabei: Wie kann ein Roboter dank "zusätzlicher Augen" seine Umgebung besser einschätzen und damit mehr Geschwindigkeit in seiner Bahn behalten? Dazu teilte das Team die Wahrnehmungsbereiche neu ein – in smarte Zonen. Bei schnelleren Bewegungen "wächst" eine solche Zone, um ein Kollisionsrisiko mit Menschen auszuschließen. Für die Umfelderfassung kommt dabei LiDAR-Sensorik (Light Detection and Ranging), die über gepulstes Laser-Licht Objekte erkennt und kategorisiert, ebenfalls zum Einsatz wie Kameras. Die Kombination von Reaktionszeiten (LiDAR: 50 Millisekunden, Kamera: 10 ms) und Überwachungsbereichen (LiDAR: größere Bereiche; Kamera: Nahfeld) erlaubt nun schnellere Bewegungen des Roboters. Um welchen Faktor genau sich die Prozesszeiten verkürzen lassen, hängt jeweils von der Tätigkeit und von der eingesetzten Hardware für Robotik und LiDAR-Sensorik ab. Für die Sicherheit muss die Roboterbewegung bei menschlicher Annäherung zwar weiterhin verlangsamt werden, aber deutlich weniger als bisher: Rund 25 Prozent schnellere Roboterbewegungen bedeuten einen erheblichen Effizienzgewinn. Anpassungsmöglichkeiten bei Bewegungsgeschwindigkeit und Beschleunigung erhöhen zudem die Akzeptanz bei den Mitarbeitenden. Teil des Softwarepakets ist auch ein Baustein für die Beurteilung aller Sicherheitsaspekte. Diese können so frühzeitig in der Anlagenplanung berücksichtigt, technisch dokumentiert und digital zertifiziert werden. Damit stehen im digitalen Abbild der Anlage alle relevanten Daten für spätere Änderungen zur Verfügung.
Sichere und effektive Mensch-Roboter-Kollaboration in der Industrie
Die Forschungsergebnisse sind Teil des EU-Projekts Sharework. Darin entwickelte ein europäisches Konsortium aus sechs Forschungseinrichtungen, dreizehn Firmen und einer Normierungsinstanz neue Lösungen für die Zusammenarbeit von Mensch und Roboter. Die verschiedenen Software- und Hardwaremodule ermöglichen insbesondere auch Schwerlastrobotern (Industrierobotern), mit Menschen zu interagieren, ohne dass physische Schutzbarrieren wie Zäune erforderlich sind. Ziel war es, im Sinne einer effektiveren Zusammenarbeit vorhandene Barrieren in der Mensch-Roboter-Kollaboration (MRK) zu überwinden – ohne Abstriche bei der Sicherheit. Arbeitsschwerpunkt für das Fraunhofer IWU waren dabei übergreifende Sicherheitsaspekte (Global Safety System). Das Ergebnis: Ein modulares System, das in der Lage ist, die Umgebung eines Roboters und menschliche Handlungen durch Wissen und Sensoren, Vorhersagen über zukünftige Zustände, intelligente Datenverarbeitung, Augmented Reality sowie Gesten- und Spracherkennungstechnologie zu verstehen. Die entwickelten Module wurden in der Automobil-, Bahn-, Metall- und Investitionsgüterindustrie bereits erprobt. Ein Einsatz ist jedoch auch in anderen industriellen Montage- und Produktionsprozessen denkbar, um die Effizienz von Fertigungsprozessen zu verbessern.
Autor(en): wi