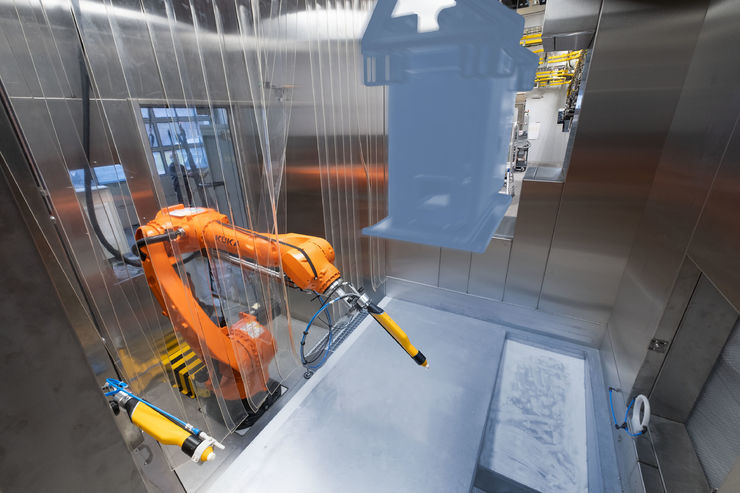
Eine der größten Herausforderung bei der Oberflächenbearbeitung sind Fehlstellen, die bei jedem Bauteil an unterschiedlichen Stellen liegen. Dies lässt sich mit der klassischen Roboterprogrammierung nicht lösen. Um das Auspolieren von Fehlstellen auf Bauteilen zu automatisieren und effizienter zu gestalten, investierte Visomax Coating 2016 in die Software ArtiMinds Robot Programming Suite (RPS) des gleichnamigen Herstellers. Mit ArtiMinds lassen sich neue Roboter einfach und intuitiv in allen möglichen Anwendungen integrieren. Die implementierte CAD2Path-Funktion ermöglicht es, komplexe Bewegungsbahnen, zum Beispiel für das Polieren eines Kotflügels, schnell und präzise zu erstellen. Um Punkte nicht manuell einteachen zu müssen, kann eine CAD-Datei eines Objektes importiert und die Bewegungsbahn anhand der Kanten des CAD-Modells erstellt werden.
Kraftgeregeltes Polieren von Fehlstellen
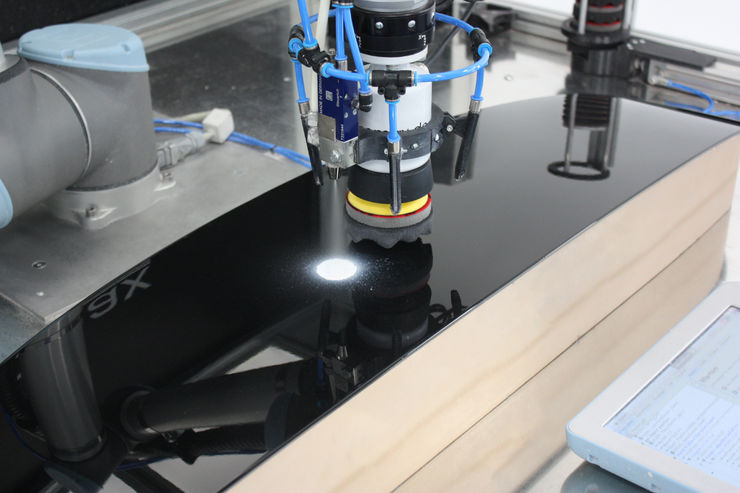
Die Schwierigkeit der Anwendung lag jedoch nicht nur im Handling von Bauteilen mit unterschiedlichen Fehlstellen, sondern auch in der Integration notwendiger Sensorik-Komponenten wie einem Kraft-Momenten-Sensor und einem Kamerasystem. Denn die Fehlstellen sollten zunächst per Kamera lokalisiert und dann kraftgeregelt angefahren und auspoliert werden. Damit die Polierbewegung immer den perfekten Anpressdruck hat, arbeitet Visomax mit dem Force-Modul der RPS. Mit den in RPS hinterlegten Templates beziehungsweise Bausteinen für einzelne Bewegungsabläufe lässt sich der Programmieraufwand im Gegensatz zur herkömmlichen Programmierung erheblich verkürzen.
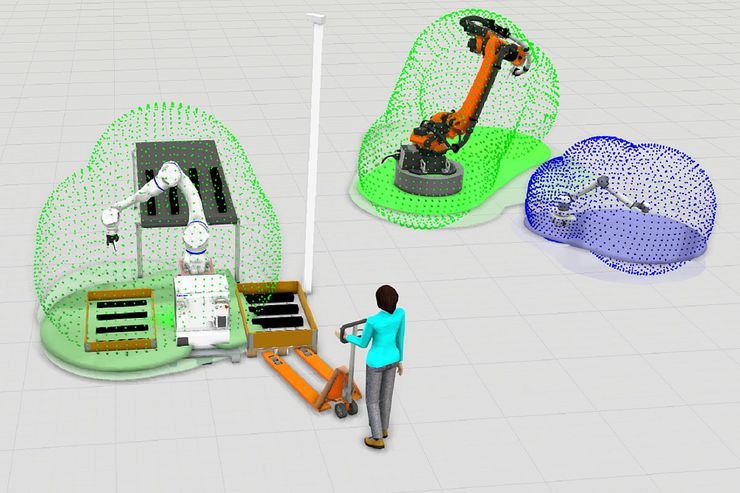
Neben dem Vorteil der leichten Bedienbarkeit und dem stark vereinfachtem Einlernen und Programmieren bietet auch die Offline-Programmierung sowie die Simulation der Roboterapplikation im dreidimensionalen Raum ein nützliches Werkzeug in der Vorbereitungsphase.
Der vollständige Beitrag ist in der Mai/Juni-Ausgabe von JOT erschienen.
Autor(en): Silke Glasstetter, ArtiMinds Robotics